Настройка Arduino IDE для работы с ESP32
ESP32 программируют в Arduino IDE почти так же, как обычные платы Arduino, — но сначала среду нужно научить «видеть» эти платы. Ниже полная настройка с нуля: установка IDE, добавление пакета плат, выбор платы и порта, драйверы и параметры загрузки. Шаги ориентированы на распространённый ESP32 DevKit (модуль WROOM / WROVER).
Что понадобится
- Плата ESP32 DevKit (распространённый модуль на ESP32-WROOM / WROVER с USB).
- Кабель USB — обязательно с линиями данных, а не только для зарядки.
- Arduino IDE 2.x.
Шаг 1. Установка Arduino IDE
Скачайте Arduino IDE 2.x с официального сайта arduino.cc и установите. При первом запуске среда предложит доустановить системные компоненты — согласитесь.

Шаг 2. Добавление плат ESP32
Поддержка ESP32 ставится через менеджер плат: сначала добавьте ссылку на пакет, затем установите сам пакет.
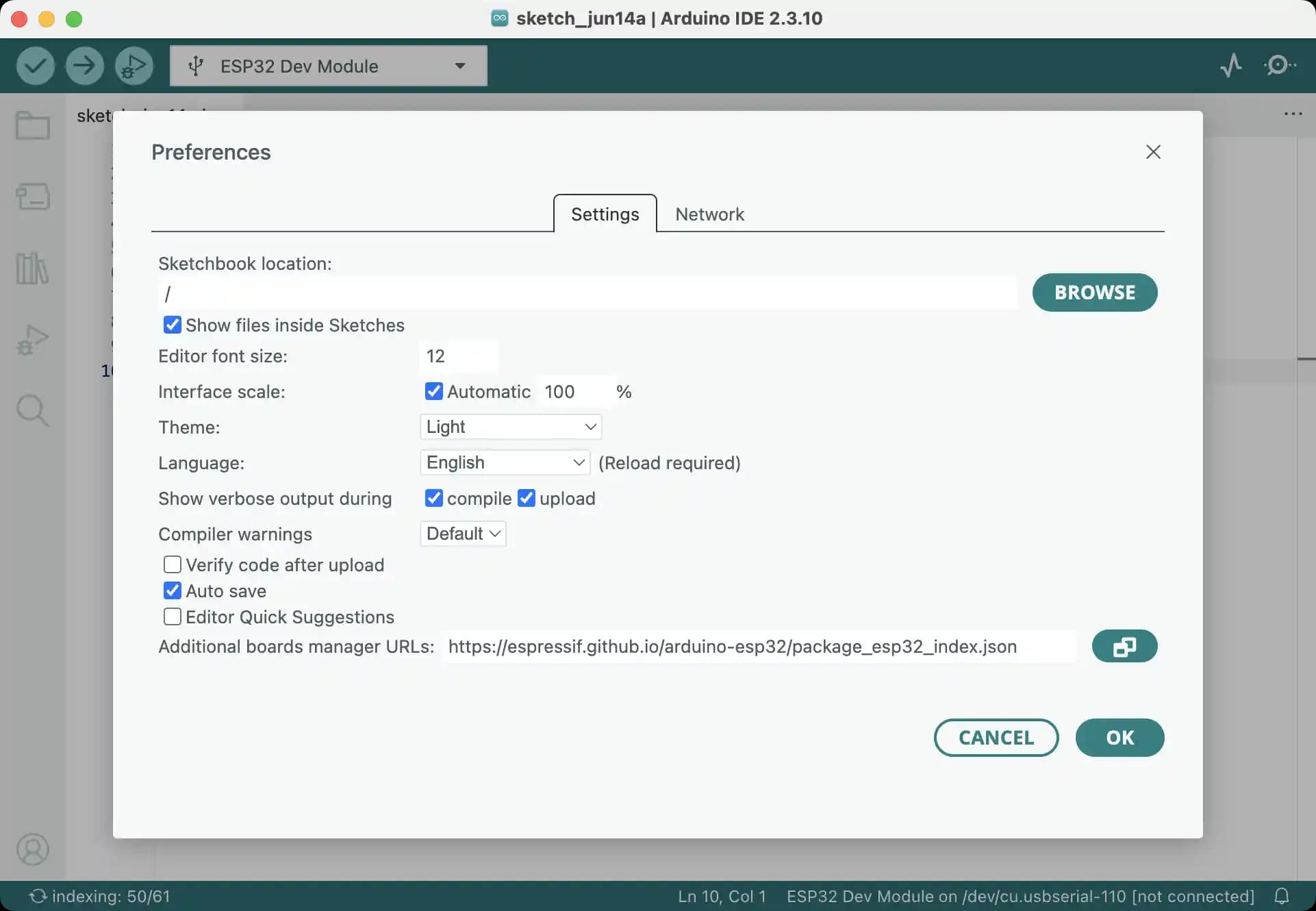
- Откройте File → Preferences (Файл → Настройки).
- В поле Additional boards manager URLs вставьте ссылку:
https://espressif.github.io/arduino-esp32/package_esp32_index.json
- Нажмите OK.
- Откройте Tools → Board → Boards Manager (Инструменты → Плата → Менеджер плат).
- Введите в поиск
esp32, найдите esp32 by Espressif Systems (версия 3.x) и нажмите Install.
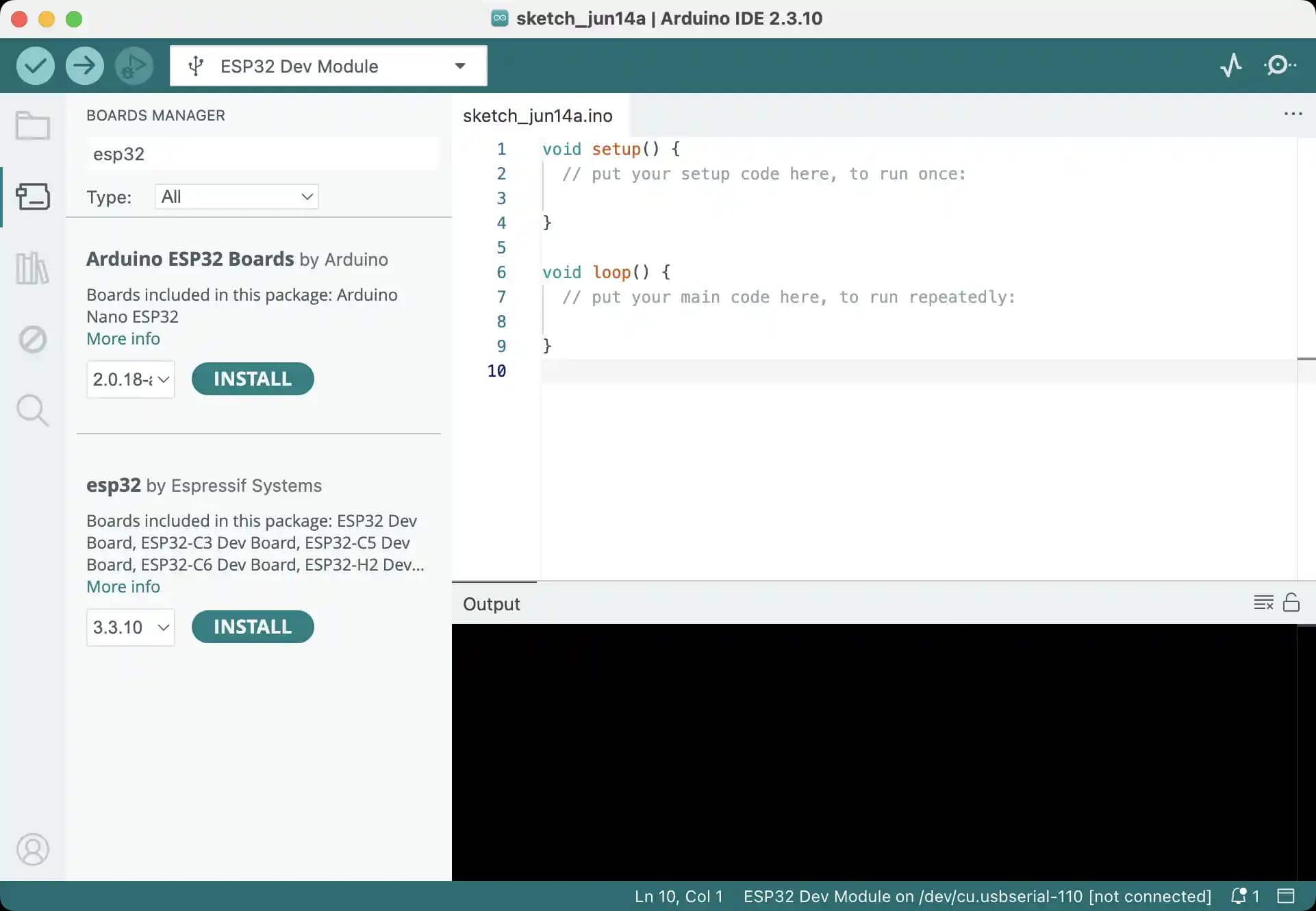
Установка скачивает компилятор и инструменты (несколько сотен мегабайт) — это нормально, дождитесь завершения.
Шаг 3. Выбор платы и порта
Подключите плату по USB и выберите её в среде:
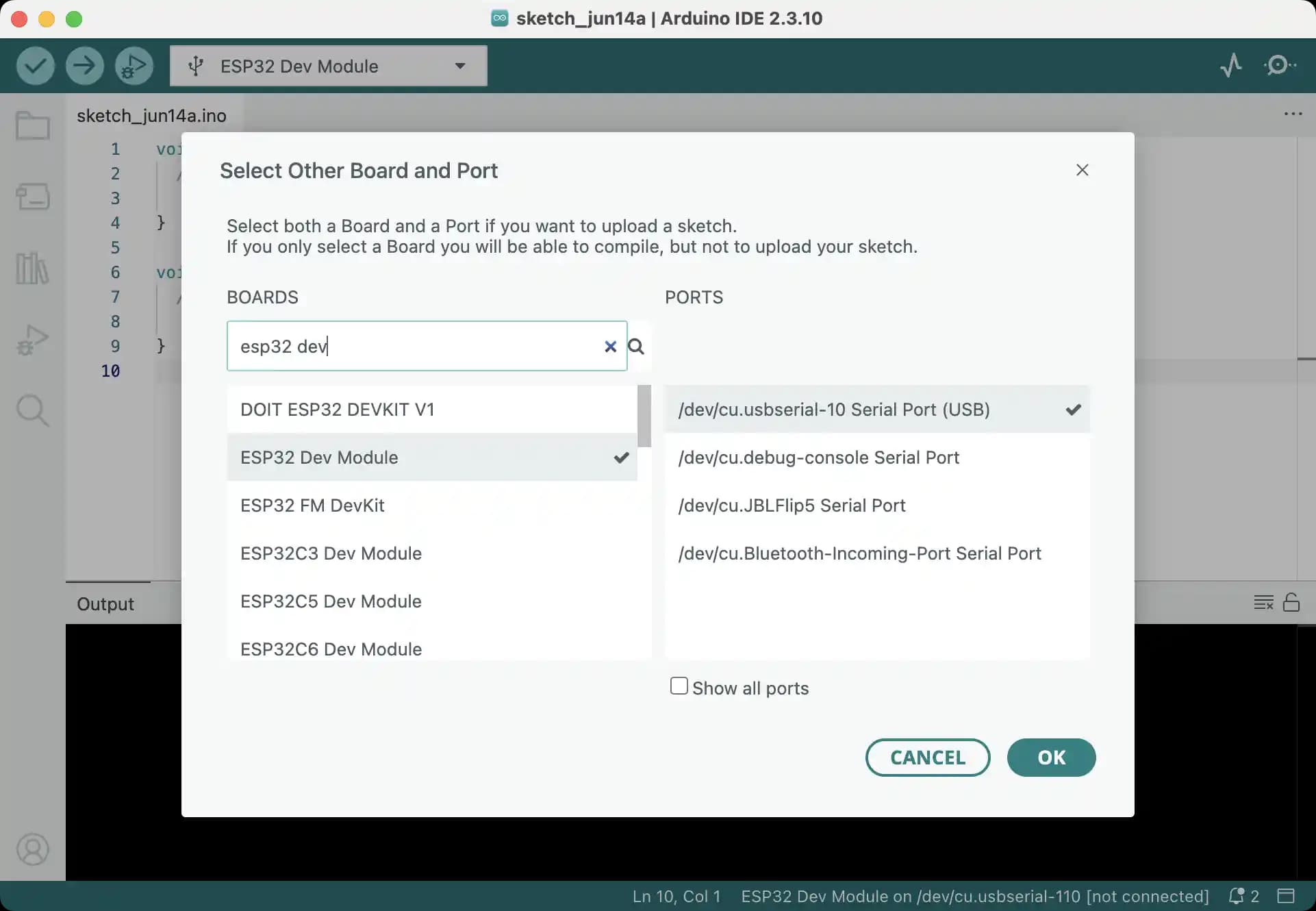
- Tools → Board → выберите ESP32 Dev Module.
- Tools → Port → выберите появившийся COM-порт (Windows) или
/dev/ttyUSB*//dev/cu.*(Linux/macOS).
В Arduino IDE 2.x плату и порт удобно выбрать через выпадающий список вверху окна — пункт Select other board and port, если ESP32 не определилась автоматически.
Шаг 4. Драйверы USB-UART
Чтобы порт появился в системе, нужен драйвер моста USB-UART. Тип моста зависит от платы:
| Мост на плате | Драйвер |
|---|---|
| CP2102 | Silicon Labs CP210x |
| CH340 | CH340 / CH341 |
Если COM-порт не появляется даже с драйвером — чаще всего виноват кабель (только зарядка, без линий данных) или сам разъём USB. Попробуйте другой кабель и порт.
Шаг 5. Параметры загрузки
Для большинства DevKit-плат подходят значения по умолчанию. Базовый набор для ESP32 Dev Module:
| Параметр | Значение |
|---|---|
| Upload Speed | 921600 (при ошибках — 115200) |
| CPU Frequency | 240 MHz |
| Flash Frequency | 80 MHz |
| Flash Mode | QIO (или DIO) |
| Flash Size | 4 MB (32 Mb) |
| Partition Scheme | Default 4MB with spiffs |
| Core Debug Level | None |
Шаг 6. Первая прошивка (Blink)
Проверим связку скетчем, мигающим встроенным светодиодом:
void setup() {
pinMode(LED_BUILTIN, OUTPUT);
}
void loop() {
digitalWrite(LED_BUILTIN, HIGH);
delay(500);
digitalWrite(LED_BUILTIN, LOW);
delay(500);
}
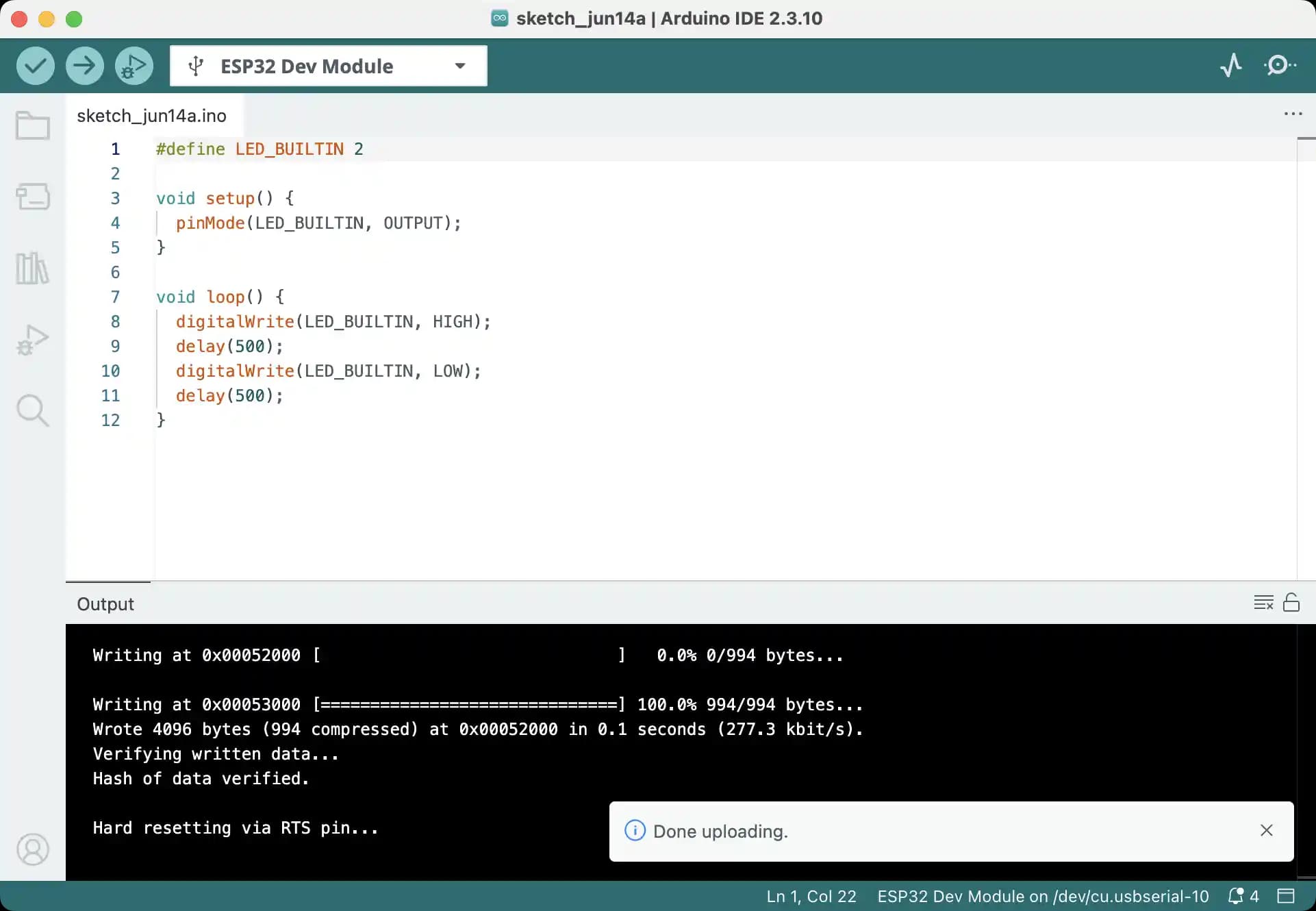
Нажмите Upload (стрелка вправо). После компиляции начнётся загрузка.
Если на DevKit встроенного светодиода нет или LED_BUILTIN не определён — задайте
пин вручную: #define LED_BUILTIN 2 (типичный светодиод на GPIO 2).
Частые проблемы
A fatal error occurred: Failed to connect to ESP32 — зажмите кнопку BOOT в
момент начала загрузки (когда в логе появляется Connecting…) и отпустите после
старта. Также помогает снизить Upload Speed до 115200.
Brownout detector was triggered — недостаточное питание: смените кабель или порт USB либо используйте источник помощнее.
Что дальше
- Команды управления роботом — RoboArm R1: команды управления.
- Прошивка из командной строки — Установка esptool под разные ОС.